Aktywne Wpisy

SadLostPuppy +5
Taka rozkmina.
Wczoraj wróciła do mnie żona, i mówi, że spowodowała kolizję, drobna stłuczka parkingowa. Cofała i wjechała w zaparkowane auto. Wróciła do mnie do domu bo była z małym dzieckiem, zaraz trzeba jechać po drugie do przedszkola, nie miała czasu na policję itp. Zostawiła za wycieraczką numer telefonu.
Kobieta która tam zaparkowała chce 1000zł bo na tyle wyceniła naprawę (zarysowania i wgniecenie na drzwiach przednich i tylnych). Niby wszystko jasne i
Wczoraj wróciła do mnie żona, i mówi, że spowodowała kolizję, drobna stłuczka parkingowa. Cofała i wjechała w zaparkowane auto. Wróciła do mnie do domu bo była z małym dzieckiem, zaraz trzeba jechać po drugie do przedszkola, nie miała czasu na policję itp. Zostawiła za wycieraczką numer telefonu.
Kobieta która tam zaparkowała chce 1000zł bo na tyle wyceniła naprawę (zarysowania i wgniecenie na drzwiach przednich i tylnych). Niby wszystko jasne i
{kind=link}


Qubn +317
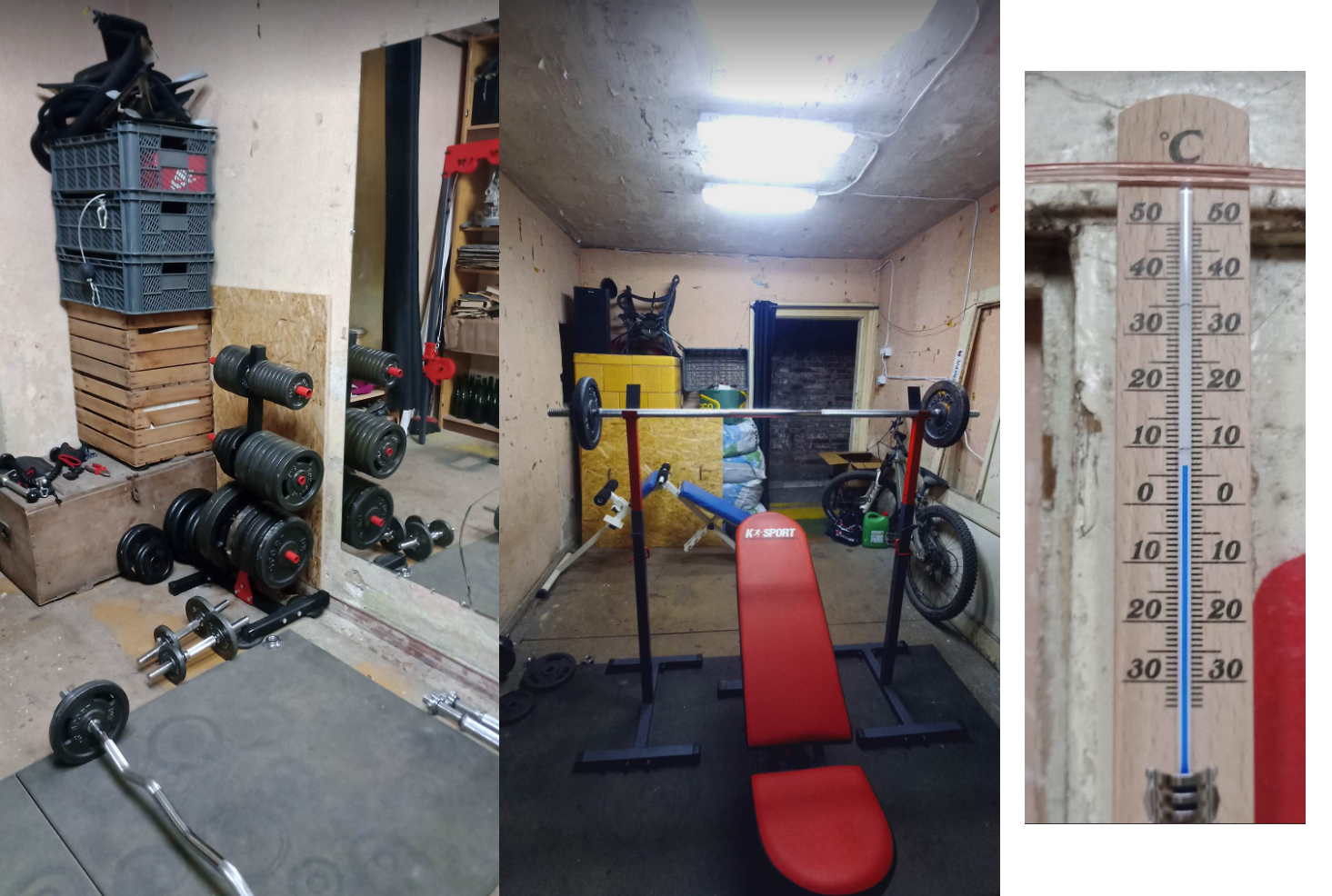
A pochwale się moją piwnicą :D tak to wyglądało na początku a w komentarzu jak jest teraz. Poza pomocą z montowaniem płyt i osb i z sufitem wszystko sam malowałem, wymyślałem, docinałem, puściłem prąd i internet kablem z mieszkania z 2. piętra starym kominem, wyniosłem piec kaflowy, zburzyłem jedną ścianę i zbiłem tynki z pozostałych, kładłem podłogę, elektrykę, lustra itp itd.
Zajęło mi około 2 miesiące :)
#mikrokoksy #silownia
Zajęło mi około 2 miesiące :)
#mikrokoksy #silownia
{kind=link}

Aktywne Znaleziska





for(uint8_t cnt=0; cnt<DEV_CNT; cnt++){
if(digitalRead(switch_nr[cnt].sw) == LOW){
if(switch_nr[cnt].state_flag == true) continue;
digitalWrite(switch_nr[cnt].l, HIGH);
digitalWrite(switch_nr[cnt].cl, HIGH);
pwm1.setPWM(cnt, 30, SERVOMAX);
pwm0.setPWM(cnt, 30, switch_nr[cnt].sv);
switch_nr[cnt].state_flag = true;
}else{
if(!switch_nr[cnt].state_flag) continue;
pwm1.setPWM(cnt, 0, SERVOMIN);
pwm0.setPWM(cnt, 0, COUNTER_MIN);
digitalWrite(switch_nr[cnt].l, LOW);
digitalWrite(switch_nr[cnt].cl, LOW);
switch_nr[cnt].state_flag = false;
}
}
}
#programowanie #cpp #arduino
Komentarz usunięty przez autora
Aaaa ciągle mylę pojęcia z przyciskami :) Chodzi o przełącznik dźwigniowy ON/OFF.
Ta takie dokładnie działanie chcę, kiedy ON to serwo działa cały czas np. od 0 do 180 i 180 do 0.
Kiedy OFF poprostu wylacza sie.
if (switch_nr[cnt].state_flag == true) continue;na
if (switch_nr[cnt].state_flag == true && switch_nr[cnt].started + RENEW_TIME > milis()) continue;i niżej dawać za zmianę servoMIN i servoMAX (o ile to odpowiada za kąt