
Mirko, mam problem z odczytami z akcelerometru, nie mam pojęcia dlaczego mi się wszystko rozjeżdża.
Otóż mam scalaka MPU-9150 z m.in 3-osiowym 16-bitowym akcelerometrem. Wynik pomiaru przyspieszenia zapisywany jest do dwóch rejestrów, w pierwszym są bity 15..8 a w drugim 7..0.
Odczyt za pomocą I2C i wysłanie na UART robię tak:
Następnie odbieram sobie dane w Javie i modyfikuję w taki sposób:
Wartości byte1 i
Otóż mam scalaka MPU-9150 z m.in 3-osiowym 16-bitowym akcelerometrem. Wynik pomiaru przyspieszenia zapisywany jest do dwóch rejestrów, w pierwszym są bity 15..8 a w drugim 7..0.
Odczyt za pomocą I2C i wysłanie na UART robię tak:
TWI_read_buf(MPU9150_ADDR, 0x3B, 2, read);
uart_putc(read[0]);
uart_putc(read[1]);Następnie odbieram sobie dane w Javie i modyfikuję w taki sposób:
int byte1 = buffer[firstSampleIndex + 1];
int byte2 = buffer[firstSampleIndex + 2];
byte1 *= 256;
byte2 += 128;
Wartości byte1 i
źródło: comment_GGxNDS2xwN7OBrNOTEA6YX1nfnlNy3Lm.jpg
Pobierz
{kind=link}
rejestr 1: ACCELXOUT[15:8]
rejestr 2: ACCELXOUT[7:0]
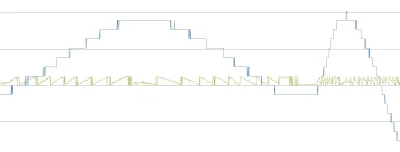
@Visher: I dokładnie tak to masz interpretować, rej2 jest młodszym bajtem wartości, a rej1 starszym. Cała wartość ma postać ((uint16)rej1)*256 + rej2.
A ty dodajesz jakieś dzikie 128 do młodszego bajtu, czyli przesuwasz go na dzień dobry o połowę w górę. I dokładnie to widać na wykresie (to, co ci nie pasuje - przesunięcie).
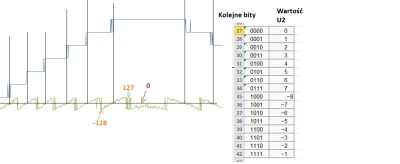
@Tymian: rozwiązałem problem, dzięki za zaangażowanie, wynika on z tego że 16-bitowy pomiar zapisywany jest w kodzie dopełnień do dwóch, a wysyłając i czytając osobno po 8-bity komputer traktuje każdą część jakby była osobnym kodem dopełnień do dwóch. Do tego doszedłem sam, a rozwiązanie znalazłem w odpowiedzi oznaczonej jako poprawną:
http://stackoverflow.com/questions/25401307/how-to-convert-twos-complement-binary-byte-to-decimal
Widać że zero na LSB pokrywa się ze skokiem na MSB na poniższym obrazku.
Miłego dnia.
http://stackoverflow.com/questions/25401307/how-to-convert-twos-complement-binary-byte-to-decimal
Widać że zero na LSB pokrywa się ze skokiem na MSB na poniższym obrazku.
Miłego dnia.
źródło: comment_mdhnng8erw6dZUQKc1NxgW2FRxi5CwSX.jpg
Pobierz{kind=link}
#teoriasygnalow #przetwarzaniesygnalow #elektronika #polibuda
źródło: comment_jKembm0iEmEU3PMnv1wnckZyoOERGyiT.jpg
Pobierzźródło: comment_fzaPpwAiQiTAkrdt3tffCS8tFqAHI1Q0.jpg
Pobierz