
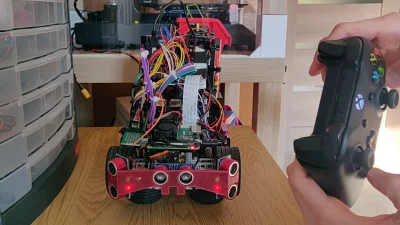
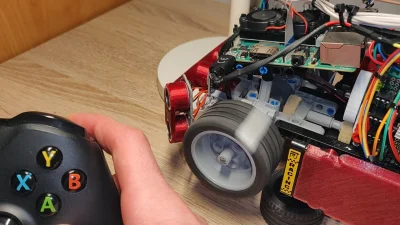
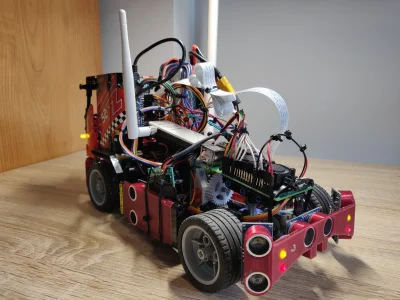
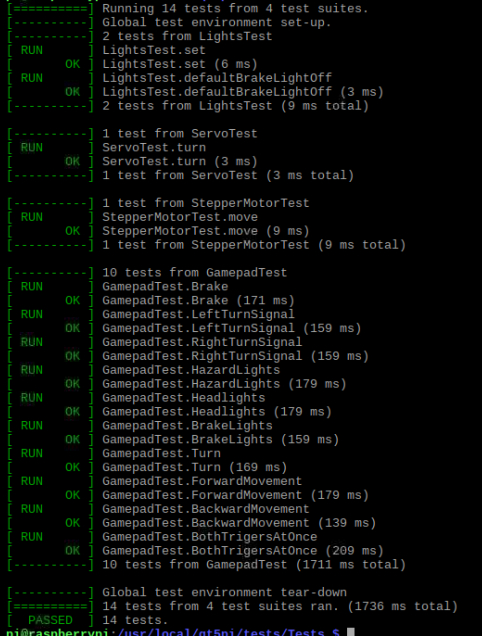
porcja filmików z wczoraj. walcze teraz z race condition. troche sie zapomnialem i mam juz tak gigantyczne zmiany jak na jednego commita ze jak cos sie #!$%@? to bedzie trudno naprawic. udalo mi sie zjechac z 25% uzycia CPU na 13%. pomiary czujników też lepsze i bardziej optymalne
#malinoweauto
#malinoweauto


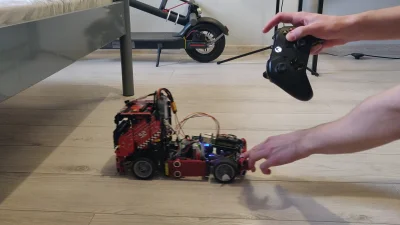
@m0d3_m4_d0wna: ucieka tylko jesli przeszkoda jest blizej niz wyhamuje. ucieka w strone gdzie ma wiecej miejsca





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
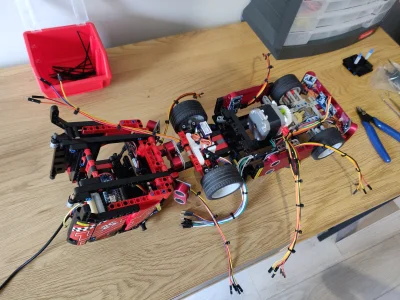
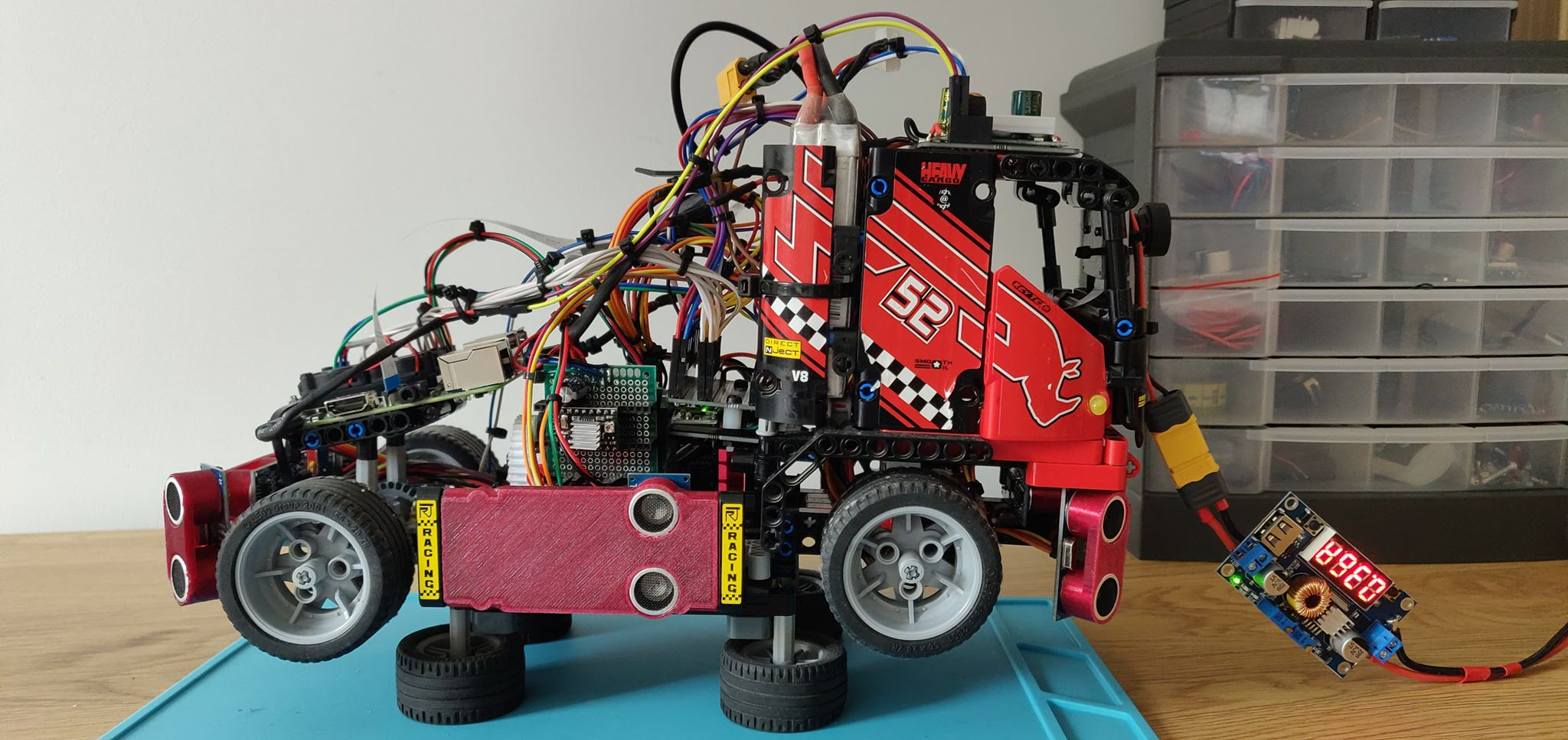
#malinoweauto #lego
źródło: comment_1590240303OKx67a8TJeOEKnNKYhF0A1.jpg
Pobierz